WTM-3. Jellyfish Robot WTM-3.くらげロボ
「World Travel Machine Project」で作ったギミックの紹介です Some of the gimmicks we created for the "World Travel Machine Project.
タグ一覧 Tag List
使っているVIVIWARE Cell VIVIWARE Cell
その他使っているもの Other Parts
「World Travel Machine Project」についてはこちらの記事から!
2階から1階へつづく階段へ動きを繋げてくれたのは、くらげロボです。
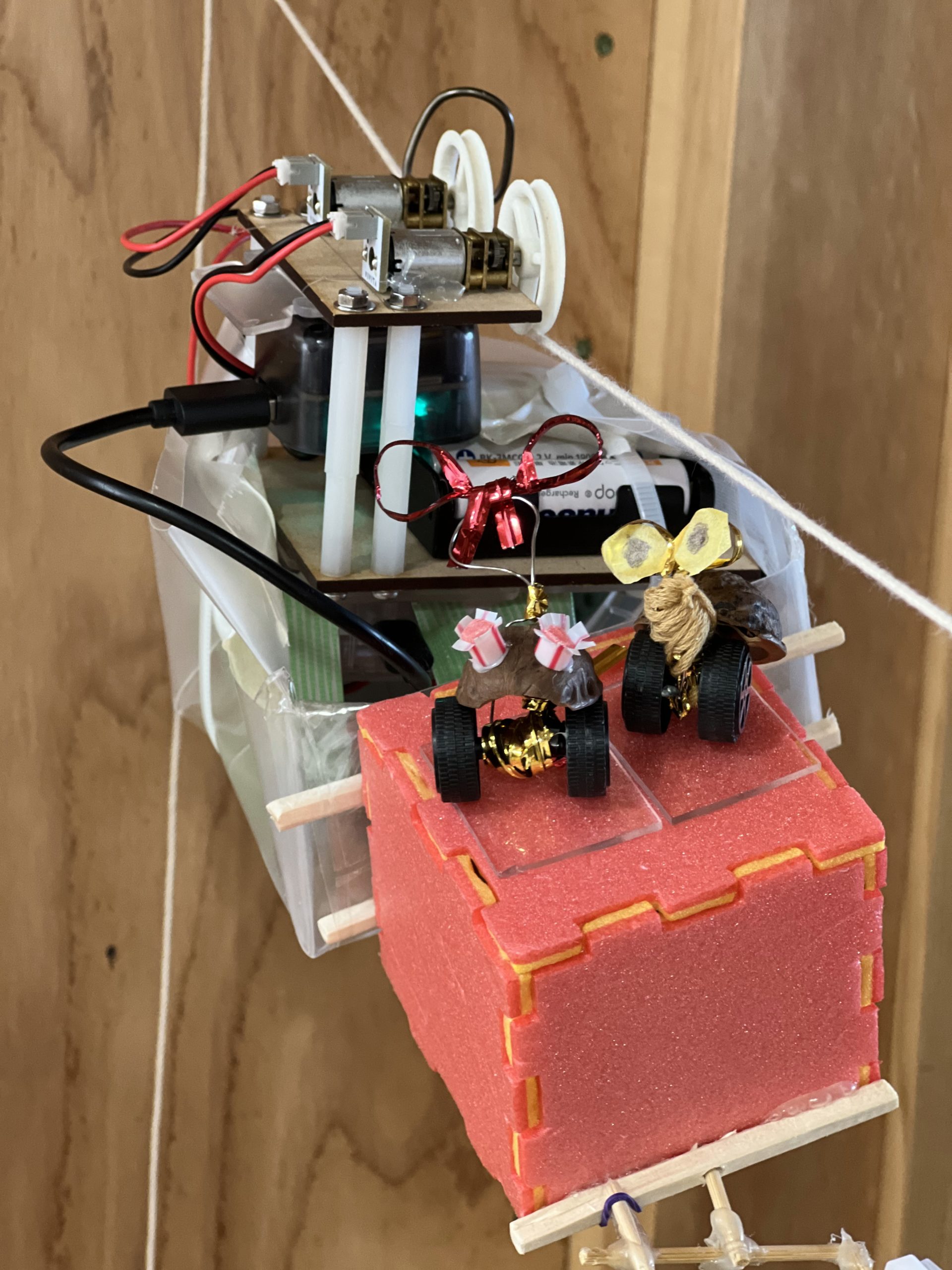
部屋の端から端をゆらゆらと移動し、壁に到着したら、真下のロウトに箱の中に抱えたボールを落として階段へ向かいます。
直前のギミックでボールがくるっと回って測距センサーの前に止まると動きだします。
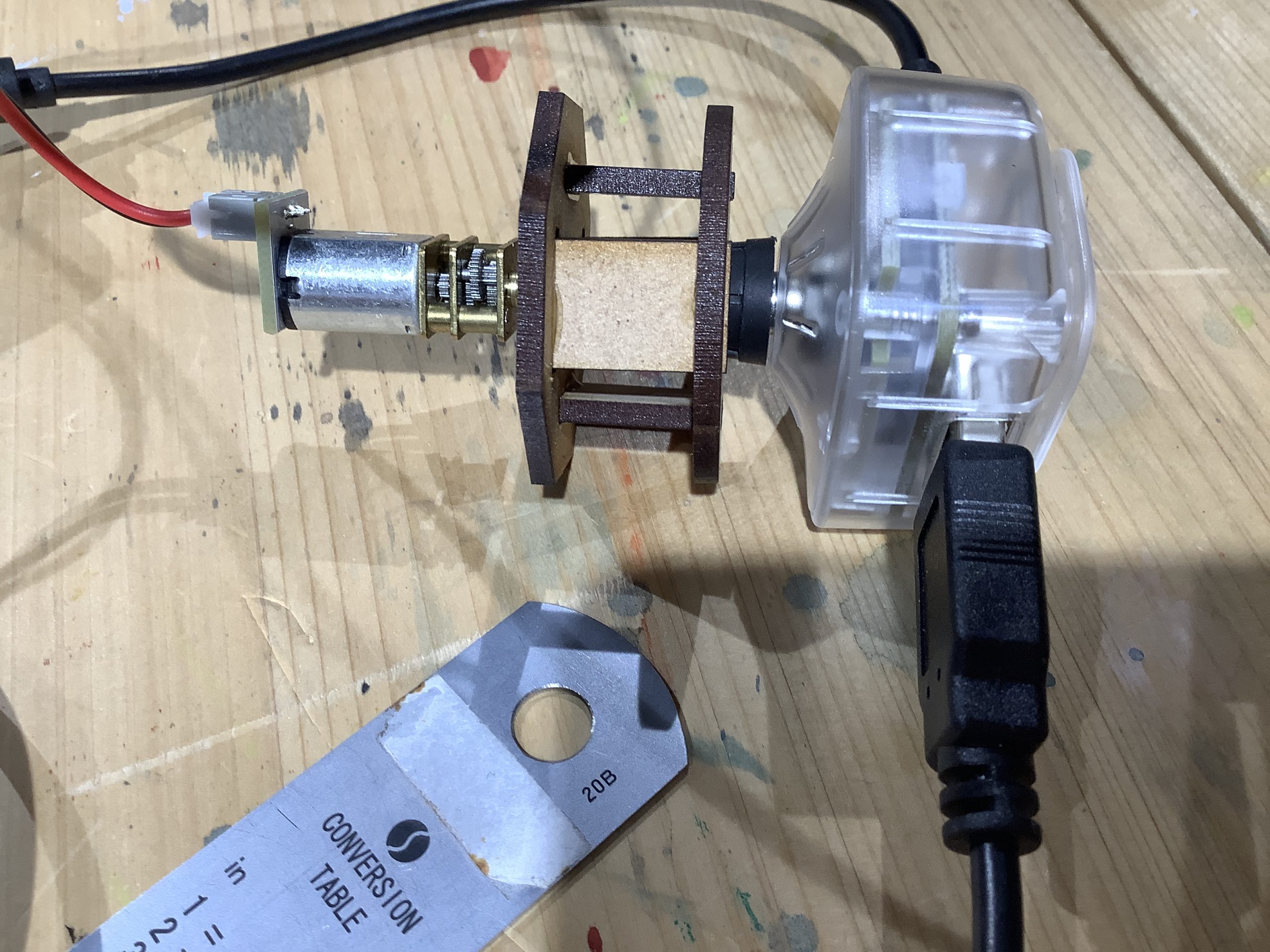
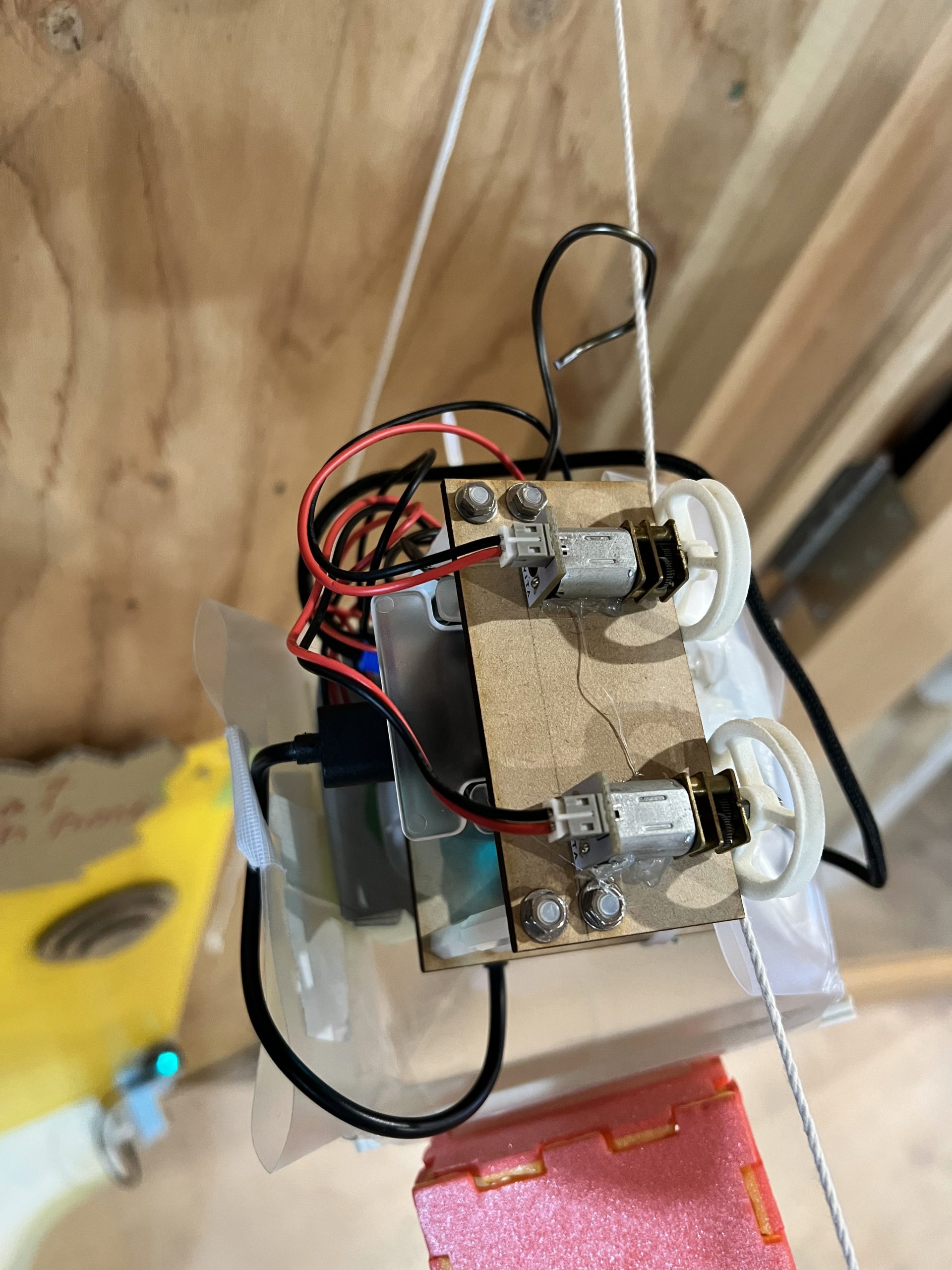
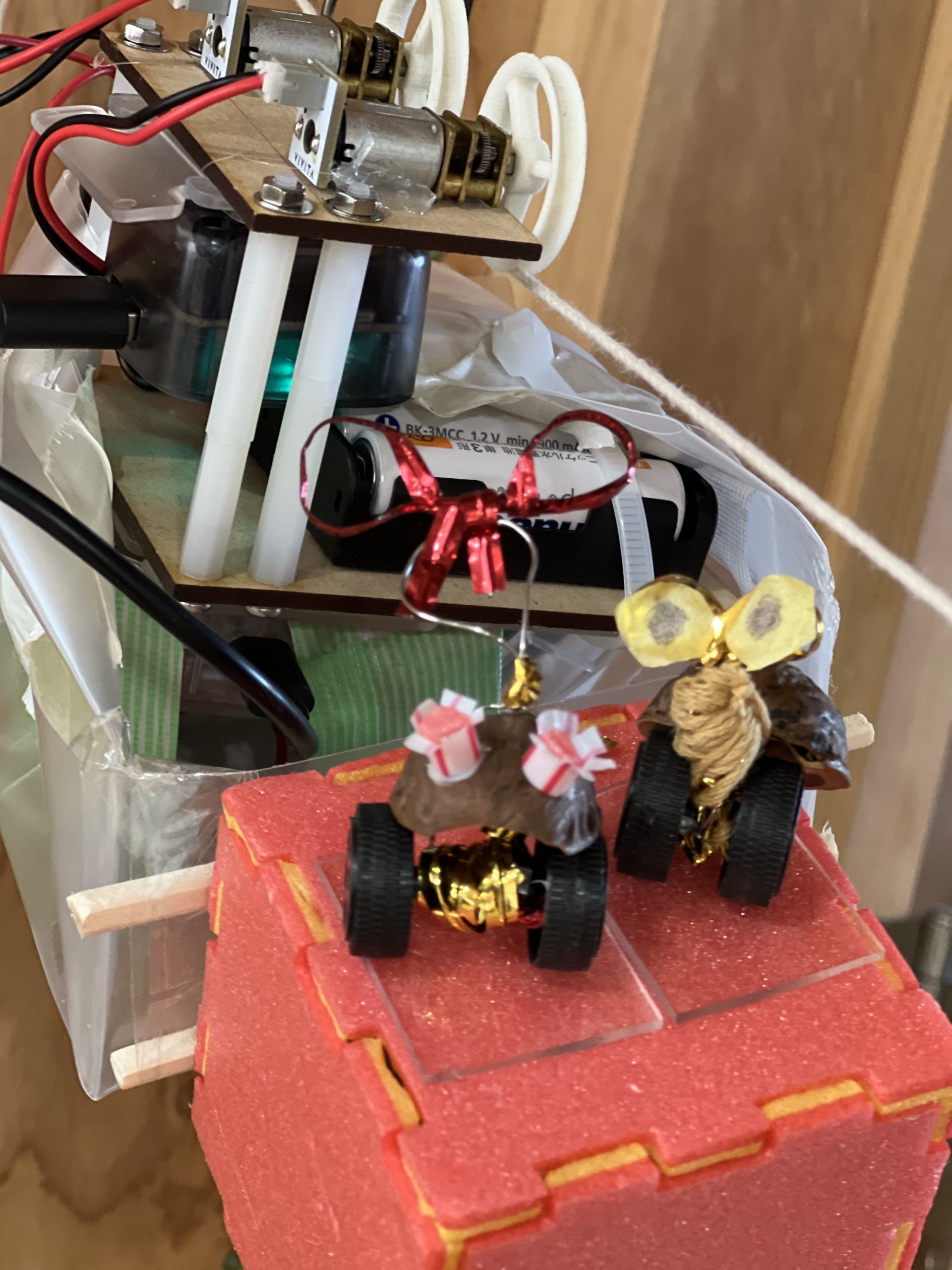
このくらげロボは、2つのモーターにタイヤを固定してひもの上に乗せてあり、綱渡りをするようになめらかに動きます。
しっぽのようにワイヤーを丸めてひもにひっかけ、落ちないようにもしています。
箱からボールが落ちる仕組みは、苦労した部分でした。
壁にぶつかるとボールを押さえていた輪ゴムが飛んでボールが落ちる、というシンプルな仕組みなのですが、何度かやるうちに成功しなくなってしまったのです。
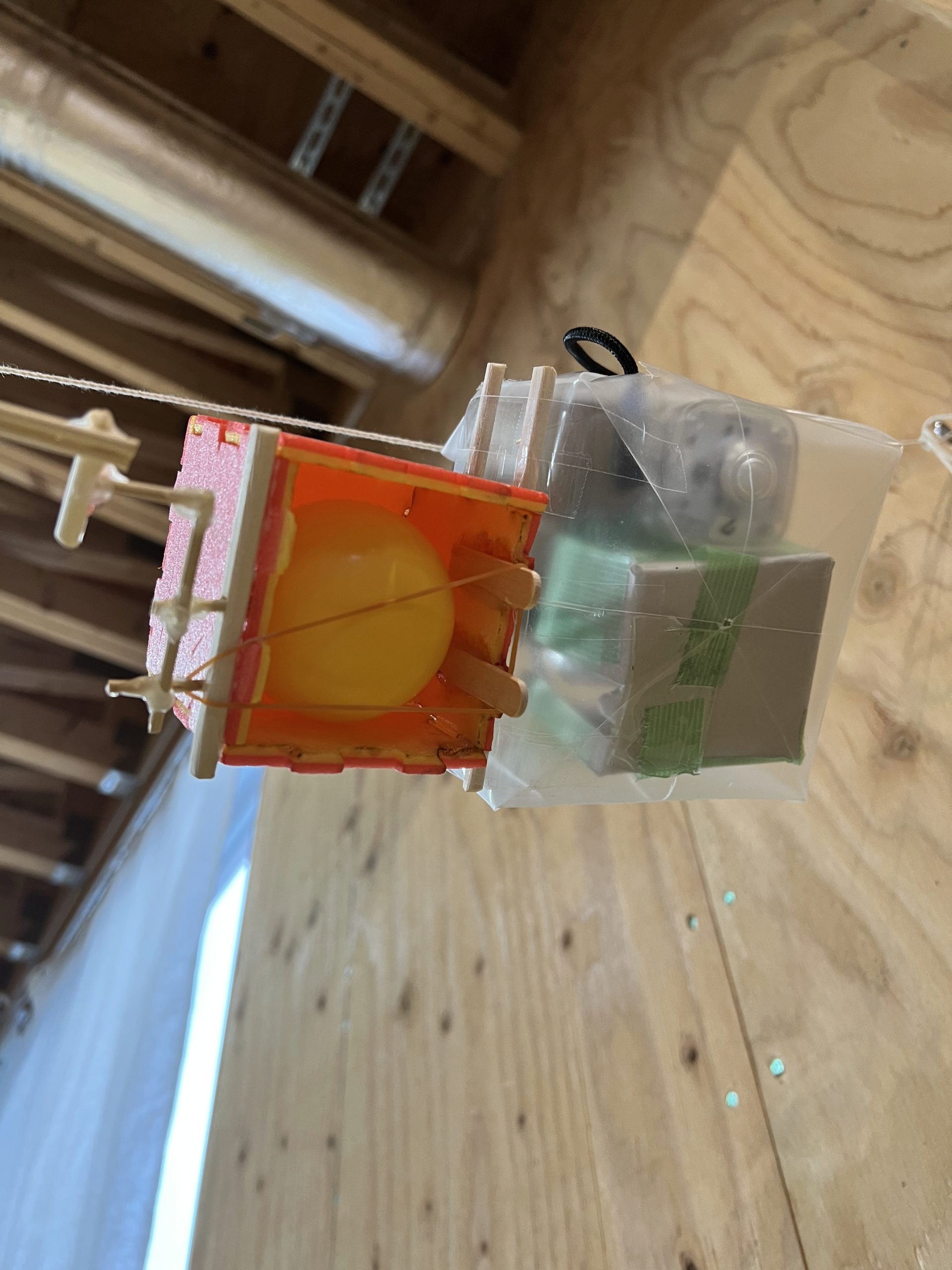
これは、テスト回数を重ねることで、軽さを優先して作ったスチロールの箱に穴があいてしまい、うまく輪ゴムが外れなくなっていたためでした。
穴をうめ、輪ゴムがひっかかる部分を調整してからは、何度やっても成功するようになりました!
本番では以前紹介した「くるみーつ」という作品でうまれたキャラ、「くるみちゃん」と「くるみ君」を乗せて颯爽と部屋を横切り、次のギミックにボールを運んでくれました!
プログラム
全体像です。
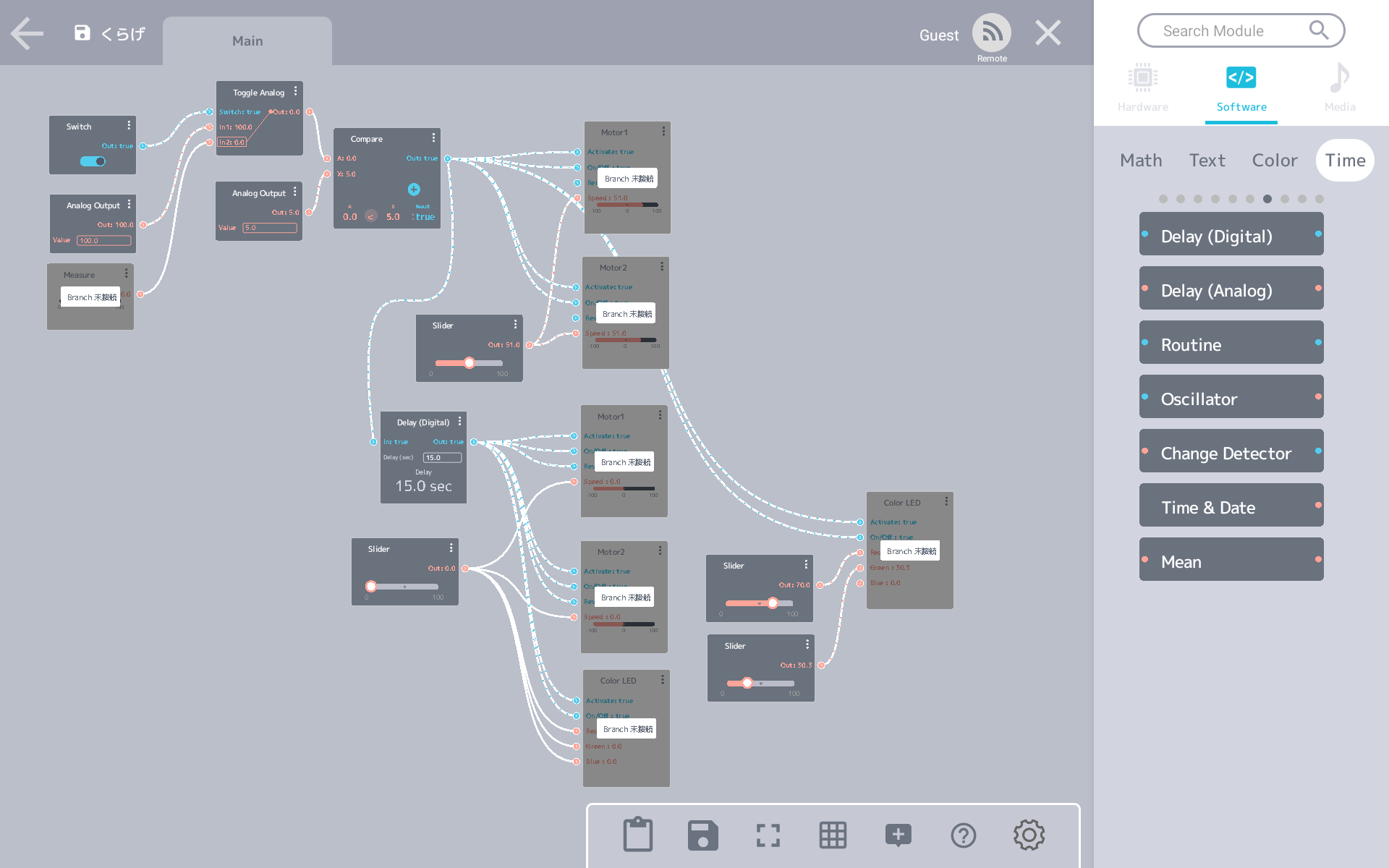
Compeareモジュールで測距センサーの値が5より小さくなったときに信号を送り、ふたつのモーターを動かします。
同時に、VIVIWARE Cell LED(以降、LED Cell)も光るように信号を送ります。
ここでも誤動作を防ぐため、MeasureモジュールをToggle Analogモジュールにつないでいます。
SwitchモジュールをOFFにしておくと、Measureモジュールからの値が送られてきてもここから先へは信号が送られず、ピストルが間違って動くことはありません。
本番ではSwitchモジュールをONにしておき、Measureモジュールからの値をCompareモジュールへ送ります。
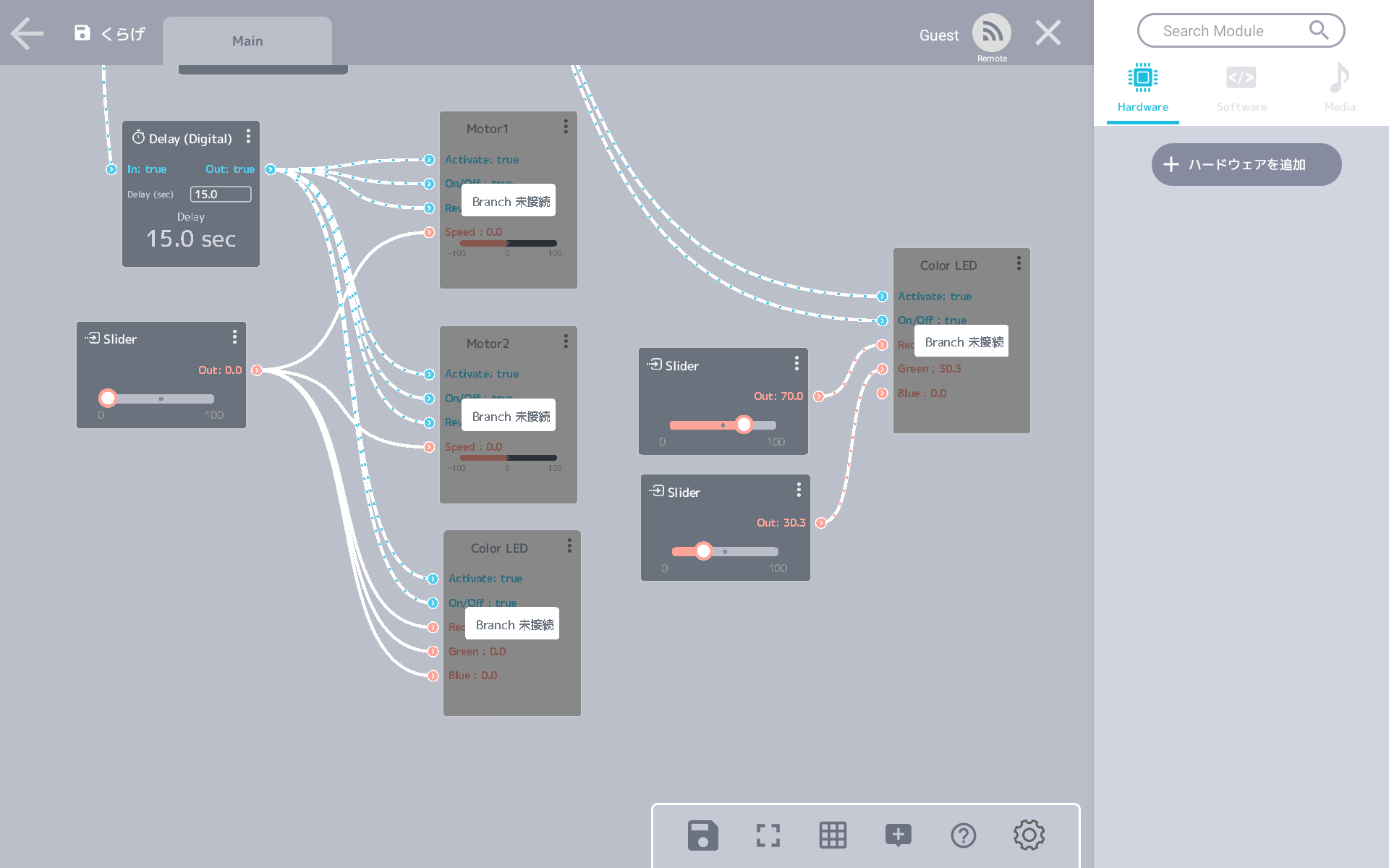
動き出してから15秒後には反対側の壁に到着するので、Digital (Delay)モジュールでモーターの速度を0にして動きを止めます。
同じく、LED Cellも値を0にして光るのを止めるようにします。
プロジェクトシェア

(Created by Shin-chan, Yama-chi, Misia)
「World Travel Machine Project」についてはこちらの記事から!
2階から1階へつづく階段へ動きを繋げてくれたのは、くらげロボです。
部屋の端から端をゆらゆらと移動し、壁に到着したら、真下のロウトに箱の中に抱えたボールを落として階段へ向かいます。
直前のギミックでボールがくるっと回って測距センサーの前に止まると動きだします。
このくらげロボは、2つのモーターにタイヤを固定してひもの上に乗せてあり、綱渡りをするようになめらかに動きます。
しっぽのようにワイヤーを丸めてひもにひっかけ、落ちないようにもしています。
箱からボールが落ちる仕組みは、苦労した部分でした。
壁にぶつかるとボールを押さえていた輪ゴムが飛んでボールが落ちる、というシンプルな仕組みなのですが、何度かやるうちに成功しなくなってしまったのです。
これは、テスト回数を重ねることで、軽さを優先して作ったスチロールの箱に穴があいてしまい、うまく輪ゴムが外れなくなっていたためでした。
穴をうめ、輪ゴムがひっかかる部分を調整してからは、何度やっても成功するようになりました!
本番では以前紹介した「くるみーつ」という作品でうまれたキャラ、「くるみちゃん」と「くるみ君」を乗せて颯爽と部屋を横切り、次のギミックにボールを運んでくれました!
プログラム
全体像です。
Compeareモジュールで測距センサーの値が5より小さくなったときに信号を送り、ふたつのモーターを動かします。
同時に、VIVIWARE Cell LED(以降、LED Cell)も光るように信号を送ります。
ここでも誤動作を防ぐため、MeasureモジュールをToggle Analogモジュールにつないでいます。
SwitchモジュールをOFFにしておくと、Measureモジュールからの値が送られてきてもここから先へは信号が送られず、ピストルが間違って動くことはありません。
本番ではSwitchモジュールをONにしておき、Measureモジュールからの値をCompareモジュールへ送ります。
動き出してから15秒後には反対側の壁に到着するので、Digital (Delay)モジュールでモーターの速度を0にして動きを止めます。
同じく、LED Cellも値を0にして光るのを止めるようにします。
プロジェクトシェア
(Created by Shin-chan, Yama-chi, Misia)