Thank you for the delivery! 置き配、OKです!
いつもありがとうございます
こちらに入れてください!
タグ一覧 Tag List
使っているVIVIWARE Cell VIVIWARE Cell
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 64
C
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 64
M
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 64
M
その他使っているもの Other Parts
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 81
<
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 81
<
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 81
<
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 81
<
- ダンボール
- シリコンゴム紐
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 94
<
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 94
<
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 94
<
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 94
<
先日、90分でアイデア出しから製作完了までやる、という「VIVIWARE道場」を社内で開催しました!
バズる作例を目指して、いくつかのチームに分かれてアイデア出しから始めました。
その中で、私たちのチームが「バズる作例」として考えたのがこの「置き配OKです」。
最近増えた置き配、ただ置いて行ってもらうのは少し味気なく、「ありがとう」と伝えたらいいなと思ってできあがったのがこちらです。

仕組み
荷物が置かれたのをセンサーで検知したら、モーターが回ってハートが現れ、いつも荷物を持ってきてくださるおにいさん・おねえさんにに感謝の気持ちを伝えます。
荷物が取り除かれたらハートは消えます。
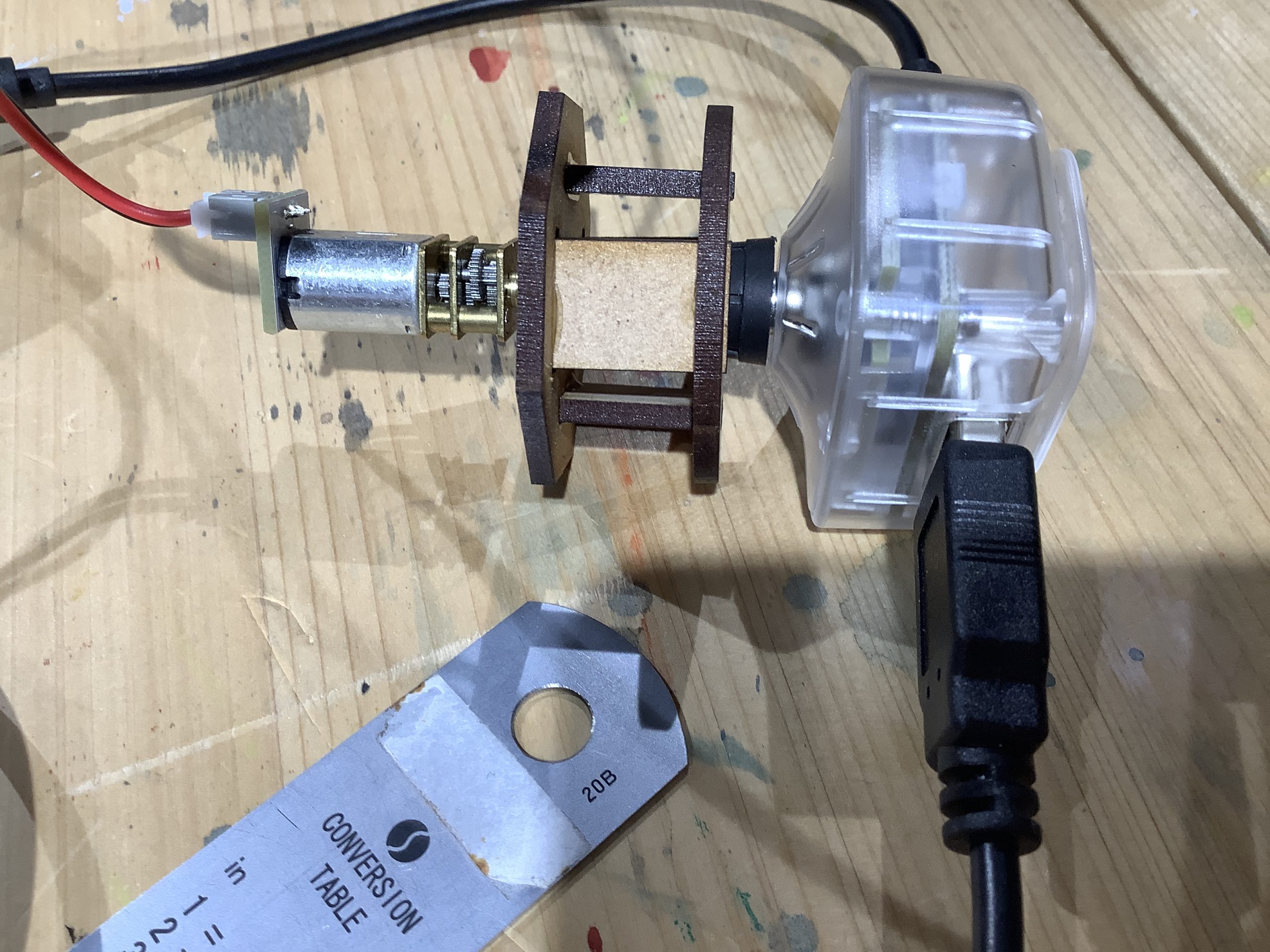
このハート、最初は「ハートが空中に出ると楽しいかも!」という発想から色々考えましたが、さすがに空中にハートを作り出すのはは難しいので、プーリーで実装しようということになりました。

また、2個のモーターを同時に回すとうまく動かないので、2個目のプーリーが動く信号が入ったら、一つ目は停止するように工夫しました。
荷物が置かれたらある一定時間だけモーターが回り(=ハートを出す)、荷物が取り除かれたら今度は反対側のモーターが一定時間回る(ハートが消える)わけですが、荷物を置いてすぐに取り出しても、同時に両方のモーターは回らないようになるのです。
プログラム
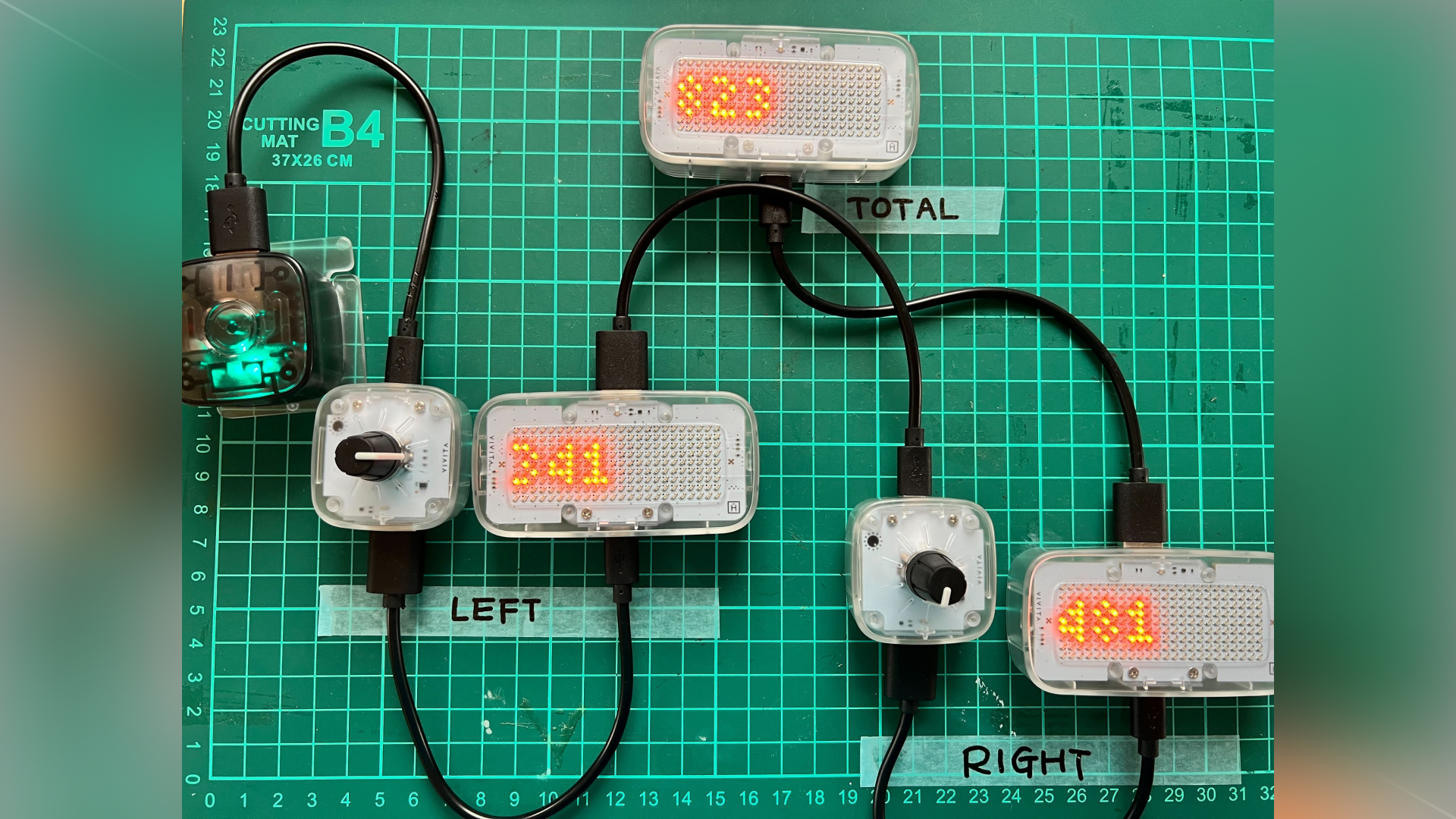
全体図は以下の通りです。
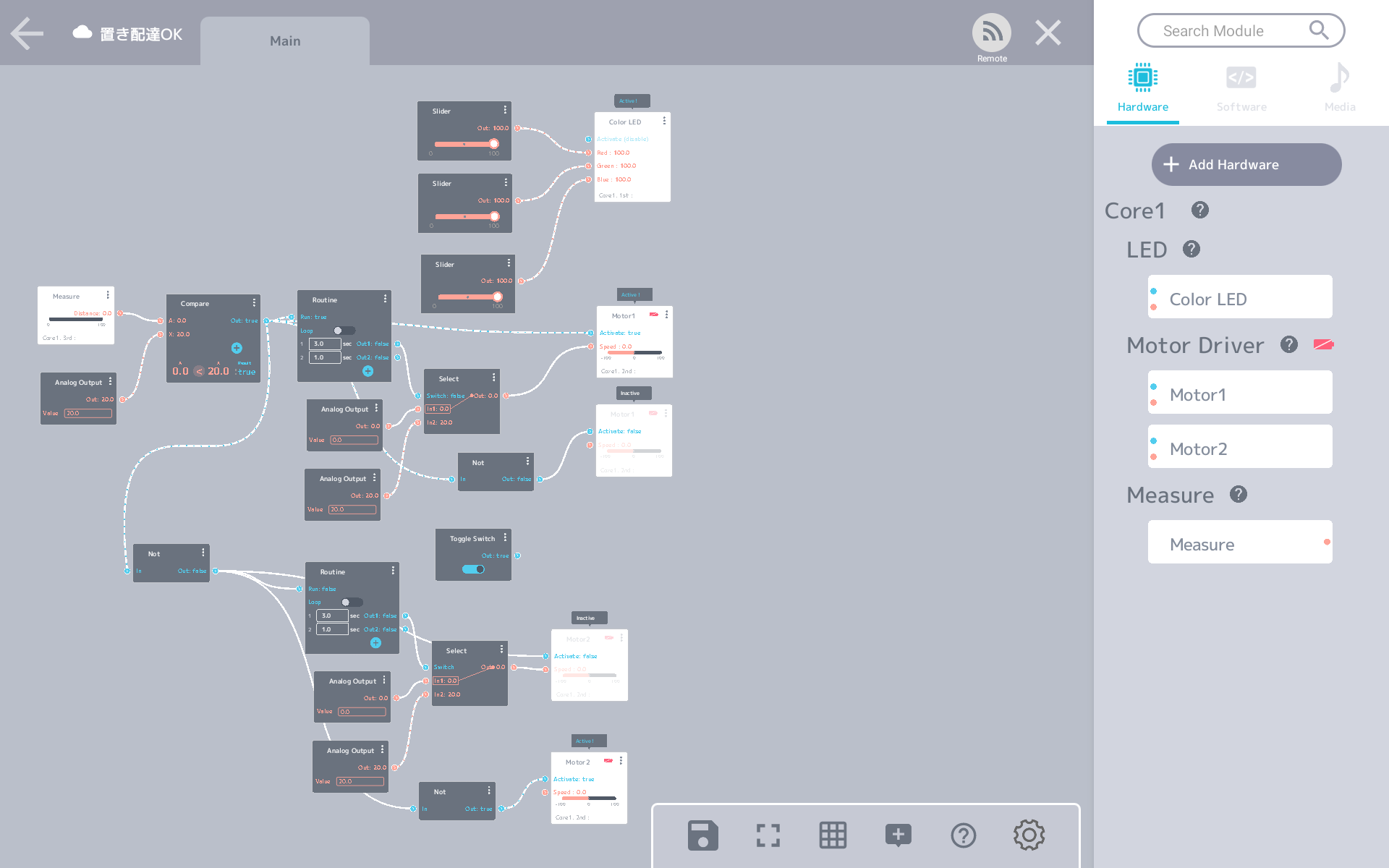
まずは、VIVIWARE Cell Measure(距離センサ)で、荷物が置かれたかしらべるために、Measure モジュールとCompare モジュールを使って、20cmより近い位置になにかモノがあるか判定します。
これを近接信号とします。
次に、この信号を使ってMotor 1を駆動します。
Routine モジュールを使い、近接信号が発生した3秒間だけMotor 1を正方向に駆動します。
最後に、近接信号がなくなった瞬間にMotor 2を駆動します。
やはりRoutine モジュールを使い、近接信号が途切れてから3秒間だけMotor 2を正方向に駆動します。
通常の動作はこれだけです。
しかし、特別な場合のための処理が追加されています。
近接信号が発生して3秒以内に近接信号がなくなった場合、つまり、荷物を置いて3秒以内に荷物が20cm以上距離センサから離れた場合の処理です。
このように、近接信号が直ぐに途切れた場合にもRoutineからの信号は止まらないのですが、Activateにモジュールをつなぐ事でMotor 1は回転しないようになっています。
同様に近接信号が切れて、3秒以内に近接信号が再度発生した場合にはMotor 2が回り続けないように動作が止まるようになっています。
プロジェクトシェア


(Created by Momoko Sato, Moe Sasagawa, Kazuyuki Kamata, Trevor Wood, and Shintaro Itamoto. Written by Hideaki Nii)
先日、90分でアイデア出しから製作完了までやる、という「VIVIWARE道場」を社内で開催しました!
バズる作例を目指して、いくつかのチームに分かれてアイデア出しから始めました。
その中で、私たちのチームが「バズる作例」として考えたのがこの「置き配OKです」。
最近増えた置き配、ただ置いて行ってもらうのは少し味気なく、「ありがとう」と伝えたらいいなと思ってできあがったのがこちらです。
仕組み
荷物が置かれたのをセンサーで検知したら、モーターが回ってハートが現れ、いつも荷物を持ってきてくださるおにいさん・おねえさんにに感謝の気持ちを伝えます。
荷物が取り除かれたらハートは消えます。
このハート、最初は「ハートが空中に出ると楽しいかも!」という発想から色々考えましたが、さすがに空中にハートを作り出すのはは難しいので、プーリーで実装しようということになりました。
また、2個のモーターを同時に回すとうまく動かないので、2個目のプーリーが動く信号が入ったら、一つ目は停止するように工夫しました。
荷物が置かれたらある一定時間だけモーターが回り(=ハートを出す)、荷物が取り除かれたら今度は反対側のモーターが一定時間回る(ハートが消える)わけですが、荷物を置いてすぐに取り出しても、同時に両方のモーターは回らないようになるのです。
プログラム
全体図は以下の通りです。
まずは、VIVIWARE Cell Measure(距離センサ)で、荷物が置かれたかしらべるために、Measure モジュールとCompare モジュールを使って、20cmより近い位置になにかモノがあるか判定します。
これを近接信号とします。
次に、この信号を使ってMotor 1を駆動します。
Routine モジュールを使い、近接信号が発生した3秒間だけMotor 1を正方向に駆動します。
最後に、近接信号がなくなった瞬間にMotor 2を駆動します。
やはりRoutine モジュールを使い、近接信号が途切れてから3秒間だけMotor 2を正方向に駆動します。
通常の動作はこれだけです。
しかし、特別な場合のための処理が追加されています。
近接信号が発生して3秒以内に近接信号がなくなった場合、つまり、荷物を置いて3秒以内に荷物が20cm以上距離センサから離れた場合の処理です。
このように、近接信号が直ぐに途切れた場合にもRoutineからの信号は止まらないのですが、Activivateにモジュールをつなぐ事でMotor 1は回転しないようになっています。
同様に近接信号が切れて、3秒以内に近接信号が再度発生した場合にはMotor 2が回り続けないように動作が止まるようになっています。
プロジェクトシェア
(Created by Momoko Sato, Moe Sasagawa, Kazuyuki Kamata, Trevor Wood, and Shintaro Itamoto. Written by Hideaki Nii)