Example 2021.10.14
Auto Feeder for My Cat 猫用自動エサやり機
10歳になる猫のために、自動エサやり機を作ってみました 10歳になる猫のために、自動エサやり機を作ってみました
タグ一覧 Tag List
使っているVIVIWARE Cell VIVIWARE Cell
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 64
C
Warning: Illegal string offset 'value' in /home/xs900707/viviware.com/public_html/wp-content/themes/theme_VIVIWARECell/single-example.php on line 64
S
その他使っているもの Other Parts
- 付属の大サーボ(2個)
- 付属の電池ボックス
- 単3電池(4本)
- サーボ(2個)
- 電池ボックス
- 単3電池(4本)
時間通りに給餌
10歳になる猫を飼っているのですが、所用で丸一日誰も家にいなかったり、朝寝坊してご飯が遅かったりすると鳴いて暴れるので、自動エサやり機を作ってみました。 仕様は以下の通り、シンプルにしました。 ・1日2食分 (12時間に1回) 、各回およそ20gのカリカリを皿に盛る ・皿に盛る直前に、飼い主の声等で知らせる
制作工程
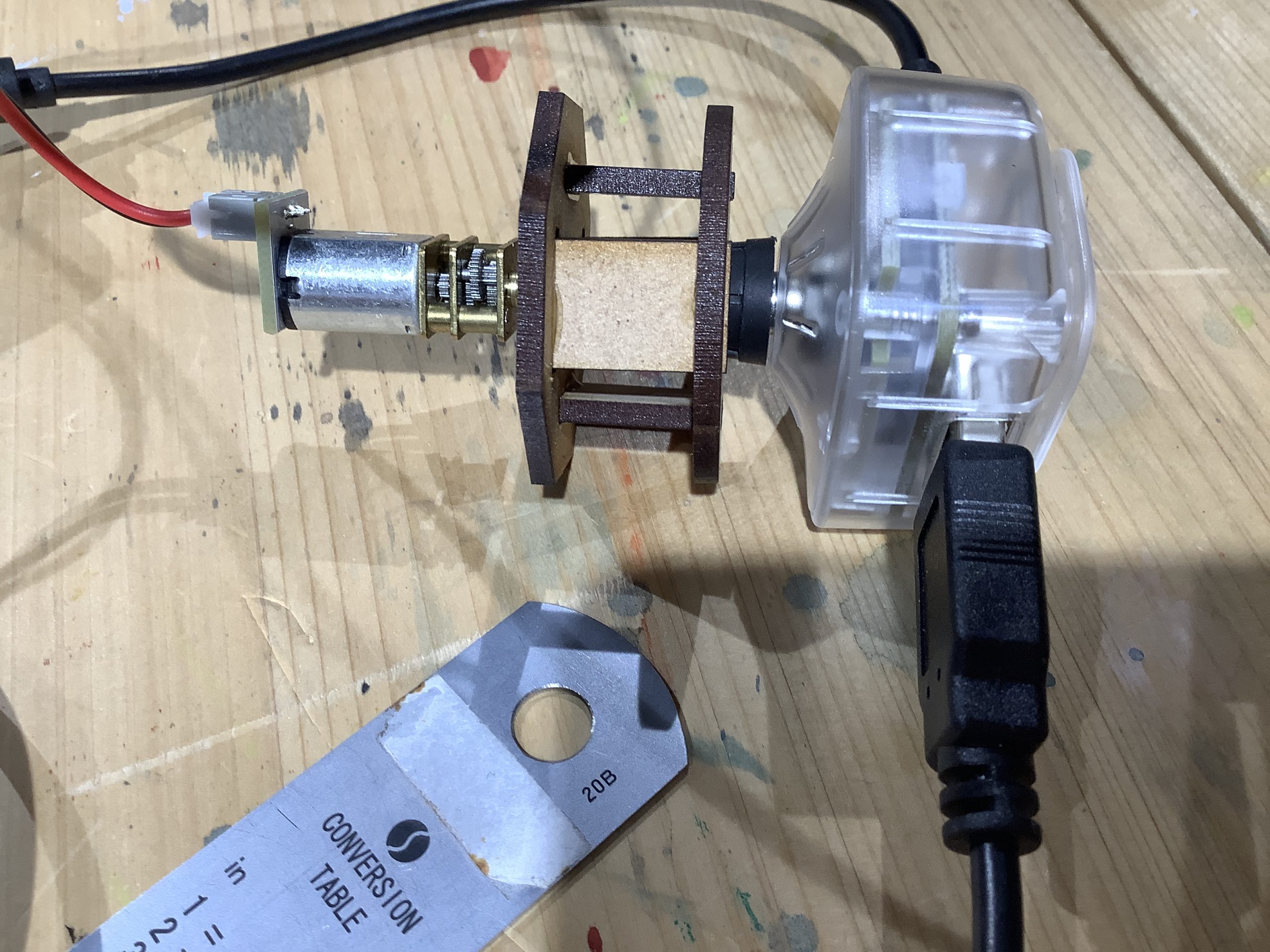
使用したBranchはVIVIWARE Cell Servo Driver 1個、あとはサーボ2個と電池だけです。サーボを固定する台座や、カリカリを充填するシリンダーはCADを使ってモデリング、3Dプリンタで出力しました。
形状はシンプルなのでモデリングは難しくないのですが、出力してみると、カリカリを充填したシリンダーの蓋がスムーズに動かず… うまくいかないので、今回は外しました。
(使用者が安全を確認しています。)
プログラム
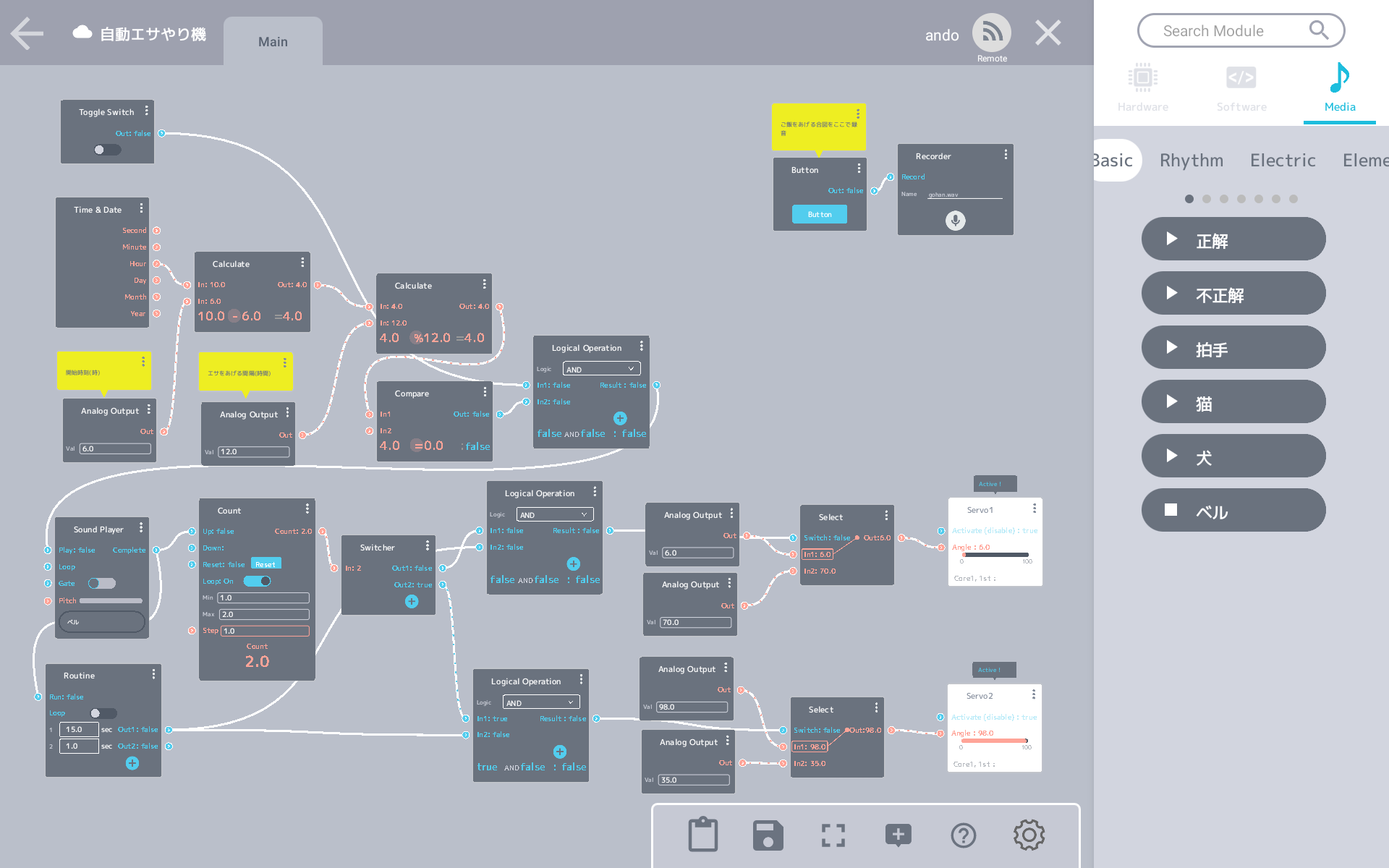
これがプログラムの全体像です。
このQRコードを「ハードウェアを追加」で起動するカメラで読み込むと、プログラムをダウンロードできます。
おおまかな仕組み
1回目にエサをあげる時刻を設定して、このように間隔を設定してから、
左上にあるToggle SwitchをONにすると動作を開始します。
プログラムの中身の詳細
・1日2食分 (12時間に1回) 、各回およそ20gのカリカリを皿に盛る ・皿に盛る直前に、飼い主の声等で知らせる というように動かしたいので、以下のように少し分解します。
1. 一定の時間間隔でトリガーを発生させる 2. トリガー発生時に音(飼い主の声)を鳴らす 3. 音を鳴らし終えたら、2つあるシリンダーの片方を選択する (次回トリガー発生時は、もう一方のシリンダーを選択する) 4. 選択したシリンダーのみを傾けて、カリカリを皿に盛りつけ、一定時間後にシリンダーを元の 位置に戻す 5. 1.に戻る
1. 一定の時間間隔でトリガーを発生させる
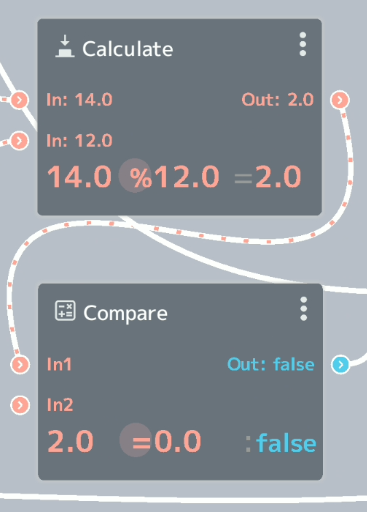
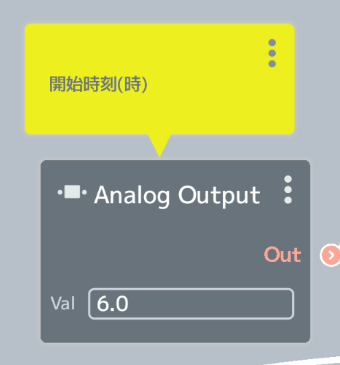
現在時刻から「開始時刻」を引いた値を「エサをあげる間隔」で割った余りをCalculate Moduleで算出し、その余りが0の場合にCompare Moduleがtrueを出力するので、それをトリガーとしています。 例えば、「開始時刻」を6時、「エサをあげる間隔」を12時間に設定し、現在時刻が17時の場合は、 (17 - 6) % 12 = 11 なので、Compare Moduleはfalseですが、現在時刻が18時の場合は、 (18 - 6) % 12 = 0 なので、Compare Moduleはtrueを出力します。 (上記「%」は、アプリ内で割り算を示す記号です)
2. トリガー発生時に音(飼い主の声)を鳴らす

トリガーが発生し、Sound player ModuleのPlayにtrueが送られると、音が鳴ります。 音を鳴らし終えるとCompleteがtrueとなり、今度はそれをトリガーにCount ModuleとRoutine Moduleが動き始めます。 Count Moduleは、2つあるシリンダーのいずれか一方を選択する役割を、Routine Moduleはシリンダーの傾きを制御する役割を担っています。
3. 音を鳴らし終えたら、2つあるシリンダーの片方を選択する
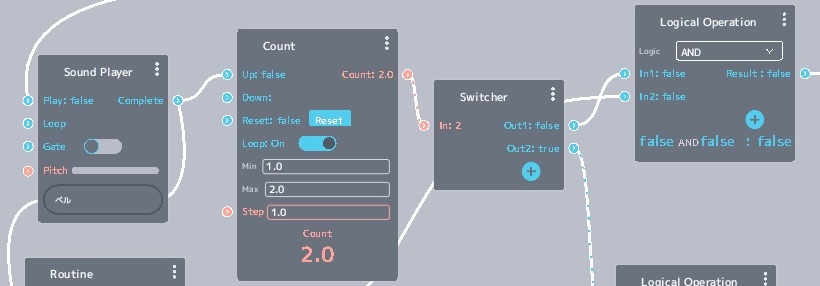
まずは、2つあるシリンダーのいずれか一方を選択します。 Sound player ModuleのCompleteがtrueを出力する度に、「Min=1, Max=2, Loop=On, Step=1」に設定したCount Moduleがカウントアップします。 すると、Switcher ModuleのOut1、Out2のいずれかをtrue出力に固定できるため、2つあるシリンダーの片方を選択した上で、次回トリガー発生時は、もう一方のシリンダーを選択することができます。
4. 選択したシリンダーのみを傾けて、カリカリを皿に盛りつけ、一定時間後にシリンダーを元の位置に戻す

先ほど、2つあるシリンダーのいずれか一方を選択できたので、次は選択したシリンダーの傾きを制御して、カリカリを皿に盛り付けます。 Sound player ModuleのCompleteがtrueを出力するとRoutine Moduleが動作を開始し、15秒間Out1にtrueを出力して、シリンダーを傾けてカリカリを皿に盛りつけます。 (シリンダーの傾き加減はSelect Moduleに接続したAnalog Outputで指定) 15秒経過後はOut1をfalseにして、シリンダーを元の位置に戻します。 Routine ModuleとSelect Moduleの間にLogical Operation ModuleのANDを挟んでいるのは、先ほどのCount ModuleとSwitcher Moduleの組み合わせで選択したシリンダーのみ動かすためです。
5. 1.に戻る
あとは上記動作の繰り返しです。 …と言っても、シリンダーが2つしかないので、2周回したら終了です?
(様々な視点から安全を確認しています)
動画
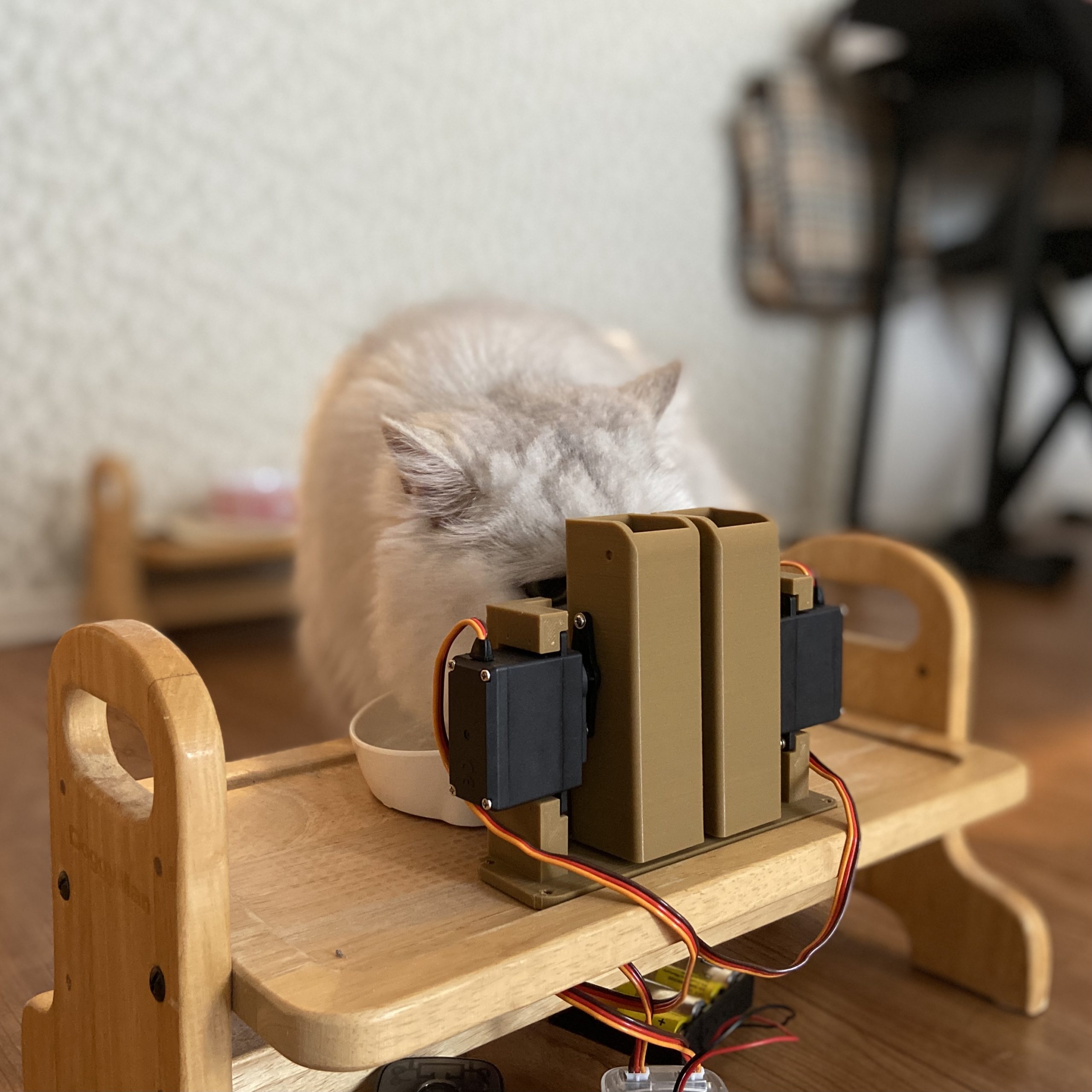
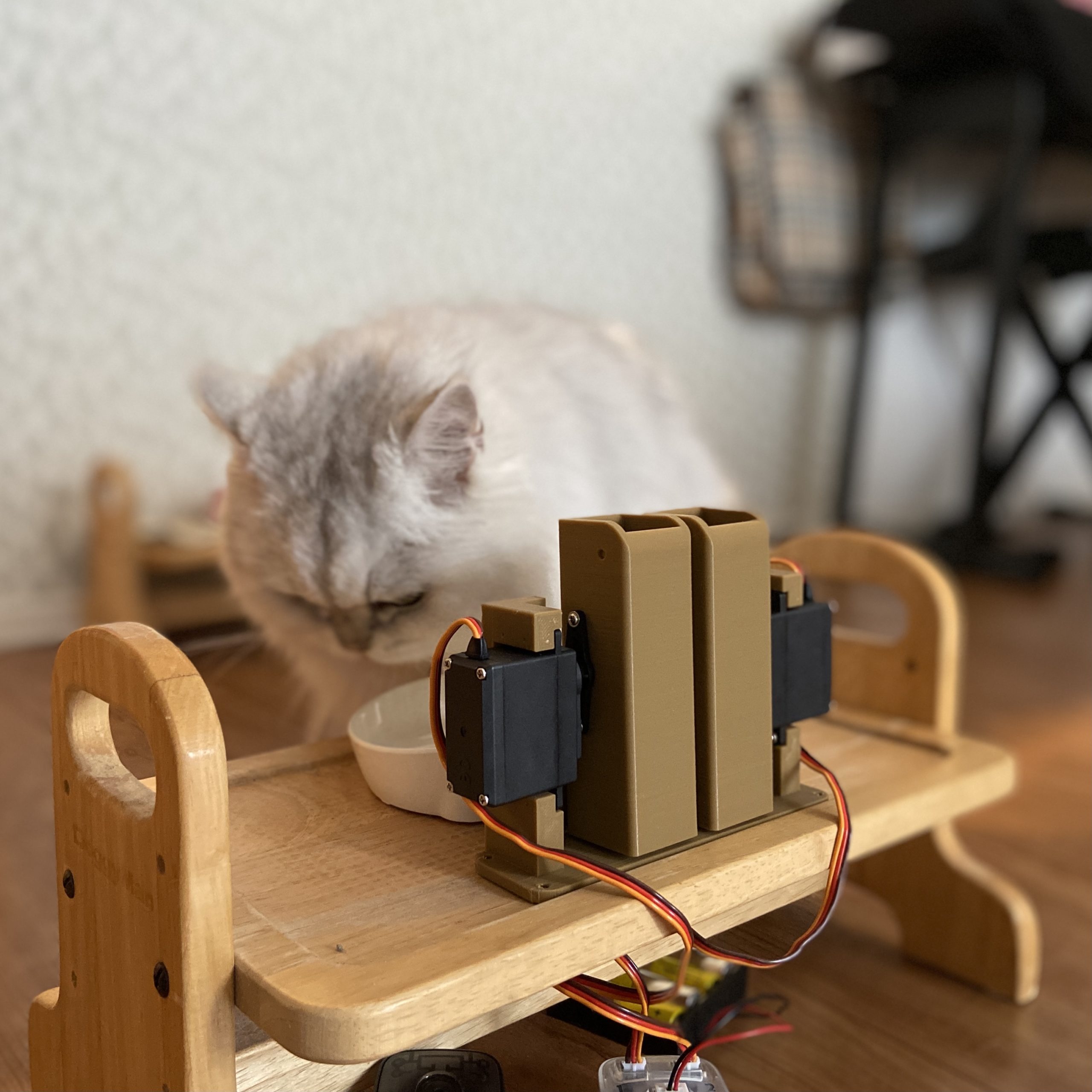
サーボの動作音がそこそこあるので、使用者本人が警戒すると思い、事前に試作機で慣らそうとしているところ。
事前にお皿に2〜3粒入れておくと寄ってきますが、実際に動くと逃げ出します。でもお腹は空いたので… 少し離れて監視。
(遠くからも、近くからも、安全確認を怠りません!)
何度か安全確認を繰り返した後、やっと食べました。
感想と今後
最も苦労したのは、稼働時に使用者本人を驚かすことなく、使ってもらうための施策を練ることでした。 稼働前に声や音で知らせて慣らしてもダメということは、そもそも動作音が大きすぎるのか… (飼い主の「ごはん」コールには無反応でした…) まだまだ試行錯誤が必要そうです。
編集後記
実はこの記事、社内ではコメントが殺到! 音や動きに警戒するネコチャンを気遣って、どうやったら動作音が減るか、音の出ないサーボについての情報などなど・・・ 合う合わないはやってみないとわかりませんが、試行錯誤しやすいのがVIVIWAREのいいところ! いろいろ試して、お気に入りの一台ができますように。 そして、無理を言って、声に反応しない使用者の方の動画も撮っていただきました! (ストレスになっていないとよいのですが・・・) そこそこお腹空いてるはずの時間帯に試した、二種類の動画で今回はおしまいです。
(全く振り返ってくれない版)
(反応して振り返ったけど出てこない版)
来週もお楽しみに!
(Created by Takashi Ando)
時間通りに給餌
10歳になる猫を飼っているのですが、所用で丸一日誰も家にいなかったり、朝寝坊してご飯が遅かったりすると鳴いて暴れるので、自動エサやり機を作ってみました。 仕様は以下の通り、シンプルにしました。 ・1日2食分 (12時間に1回) 、各回およそ20gのカリカリを皿に盛る ・皿に盛る直前に、飼い主の声等で知らせる
制作工程
使用したBranchはVIVIWARE Cell Servo Driver 1個、あとはサーボ2個と電池だけです。
(使用者が安全を確認しています。)
プログラム
これがプログラムの全体像です。
おおまかな仕組み
1回目にエサをあげる時刻を設定して、
プログラムの中身の詳細
・1日2食分 (12時間に1回) 、各回およそ20gのカリカリを皿に盛る ・皿に盛る直前に、飼い主の声等で知らせる というように動かしたいので、以下のように少し分解します。
1. 一定の時間間隔でトリガーを発生させる 2. トリガー発生時に音(飼い主の声)を鳴らす 3. 音を鳴らし終えたら、2つあるシリンダーの片方を選択する (次回トリガー発生時は、もう一方のシリンダーを選択する) 4. 選択したシリンダーのみを傾けて、カリカリを皿に盛りつけ、一定時間後にシリンダーを元の 位置に戻す 5. 1.に戻る
1. 一定の時間間隔でトリガーを発生させる
現在時刻から「開始時刻」を引いた値を「エサをあげる間隔」で割った余りをCalculate Moduleで算出し、その余りが0の場合にCompare Moduleがtrueを出力するので、それをトリガーとしています。 例えば、「開始時刻」を6時、「エサをあげる間隔」を12時間に設定し、現在時刻が17時の場合は、 (17 - 6) % 12 = 11 なので、Compare Moduleはfalseですが、現在時刻が18時の場合は、 (18 - 6) % 12 = 0 なので、Compare Moduleはtrueを出力します。 (上記「%」は、アプリ内で割り算を示す記号です)
2. トリガー発生時に音(飼い主の声)を鳴らす
トリガーが発生し、Sound player ModuleのPlayにtrueが送られると、音が鳴ります。 音を鳴らし終えるとCompleteがtrueとなり、今度はそれをトリガーにCount ModuleとRoutine Moduleが動き始めます。 Count Moduleは、2つあるシリンダーのいずれか一方を選択する役割を、Routine Moduleはシリンダーの傾きを制御する役割を担っています。
3. 音を鳴らし終えたら、2つあるシリンダーの片方を選択する
まずは、2つあるシリンダーのいずれか一方を選択します。 Sound player ModuleのCompleteがtrueを出力する度に、「Min=1, Max=2, Loop=On, Step=1」に設定したCount Moduleがカウントアップします。 すると、Switcher ModuleのOut1、Out2のいずれかをtrue出力に固定できるため、2つあるシリンダーの片方を選択した上で、次回トリガー発生時は、もう一方のシリンダーを選択することができます。
4. 選択したシリンダーのみを傾けて、カリカリを皿に盛りつけ、一定時間後にシリンダーを元の位置に戻す
先ほど、2つあるシリンダーのいずれか一方を選択できたので、次は選択したシリンダーの傾きを制御して、カリカリを皿に盛り付けます。 Sound player ModuleのCompleteがtrueを出力するとRoutine Moduleが動作を開始し、15秒間Out1にtrueを出力して、シリンダーを傾けてカリカリを皿に盛りつけます。 (シリンダーの傾き加減はSelect Moduleに接続したAnalog Outputで指定) 15秒経過後はOut1をfalseにして、シリンダーを元の位置に戻します。 Routine ModuleとSelect Moduleの間にLogical Operation ModuleのANDを挟んでいるのは、先ほどのCount ModuleとSwitcher Moduleの組み合わせで選択したシリンダーのみ動かすためです。
5. 1.に戻る
あとは上記動作の繰り返しです。 …と言っても、シリンダーが2つしかないので、2周回したら終了です?
(様々な視点から安全を確認しています)
動画
サーボの動作音がそこそこあるので、使用者本人が警戒すると思い、事前に試作機で慣らそうとしているところ。
事前にお皿に2〜3粒入れておくと寄ってきますが、実際に動くと逃げ出します。
何度か安全確認を繰り返した後、やっと食べました。
感想と今後
最も苦労したのは、稼働時に使用者本人を驚かすことなく、使ってもらうための施策を練ることでした。 稼働前に声や音で知らせて慣らしてもダメということは、そもそも動作音が大きすぎるのか… (飼い主の「ごはん」コールには無反応でした…) まだまだ試行錯誤が必要そうです。
編集後記
実はこの記事、社内ではコメントが殺到! 音や動きに警戒するネコチャンを気遣って、どうやったら動作音が減るか、音の出ないサーボについての情報などなど・・・ 合う合わないはやってみないとわかりませんが、試行錯誤しやすいのがVIVIWAREのいいところ! いろいろ試して、お気に入りの一台ができますように。 そして、無理を言って、声に反応しない使用者の方の動画も撮っていただきました! (ストレスになっていないとよいのですが・・・) そこそこお腹空いてるはずの時間帯に試した、二種類の動画で今回はおしまいです。
(全く振り返ってくれない版)
(反応して振り返ったけど出てこない版)
来週もお楽しみに!
(Created by Takashi Ando)