Example 2021.12.24
Person-Following Robot ついてくるペット
二股の距離センサとテンプレロボを組み合わせ、人物追跡ロボットを作成しました! 二股の距離センサとテンプレロボを組み合わせ、人物追跡ロボットを作成しました!
タグ一覧 Tag List
今回は、VIVISTOP mini in YAMAGUCHIで作成された作品を紹介します!
VIVISTOP mini in YAMAGUCHIとは
2021年7月25日〜10月31日の間、山口市中心商店街にオープンした期間限定のVIVISTOPです。 商店街をフィールドとし、「こんな商店街あったらいいな」という「自分の住むまちがもっとこうだったらいいのに」という子どもたちのアイデアを元に、VIVISTOPで実際に形にして商店街で試すことで、自分自身でまちや社会を変えられるという自信や実感を育むことを目指し活動を行なっておりました。
動画
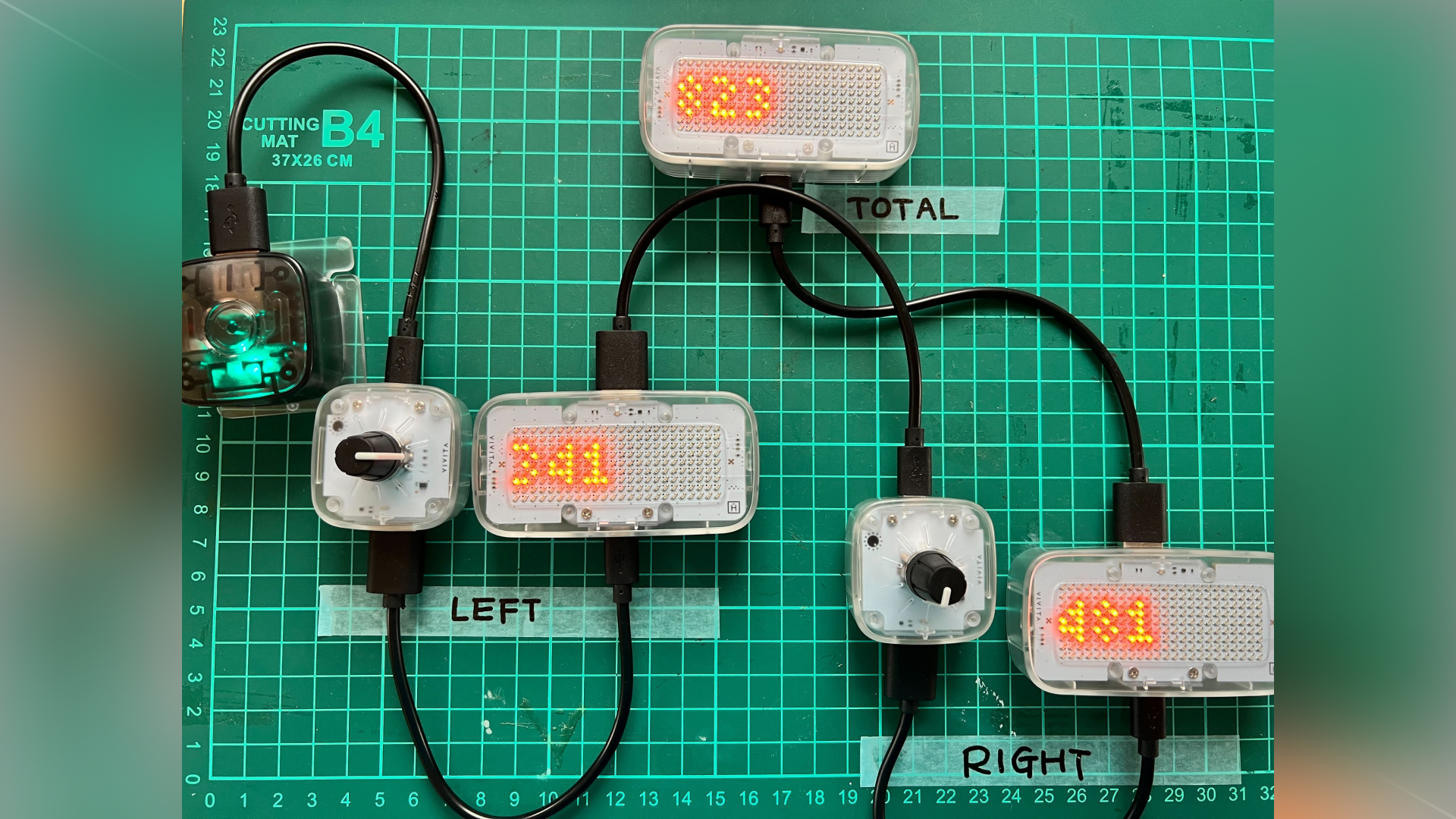
ロボットの前方に装着した二股の距離センサから対象物の左右の距離の差分を算出し、距離が遠い方向に向かうようにモーターの回転速度を自動調節します。 この機能自体は虫の触覚にとても似ていますし、前方からの見た目も虫っぽいです。 それではさっそく動いている様子をご覧ください!
二股距離センサ?
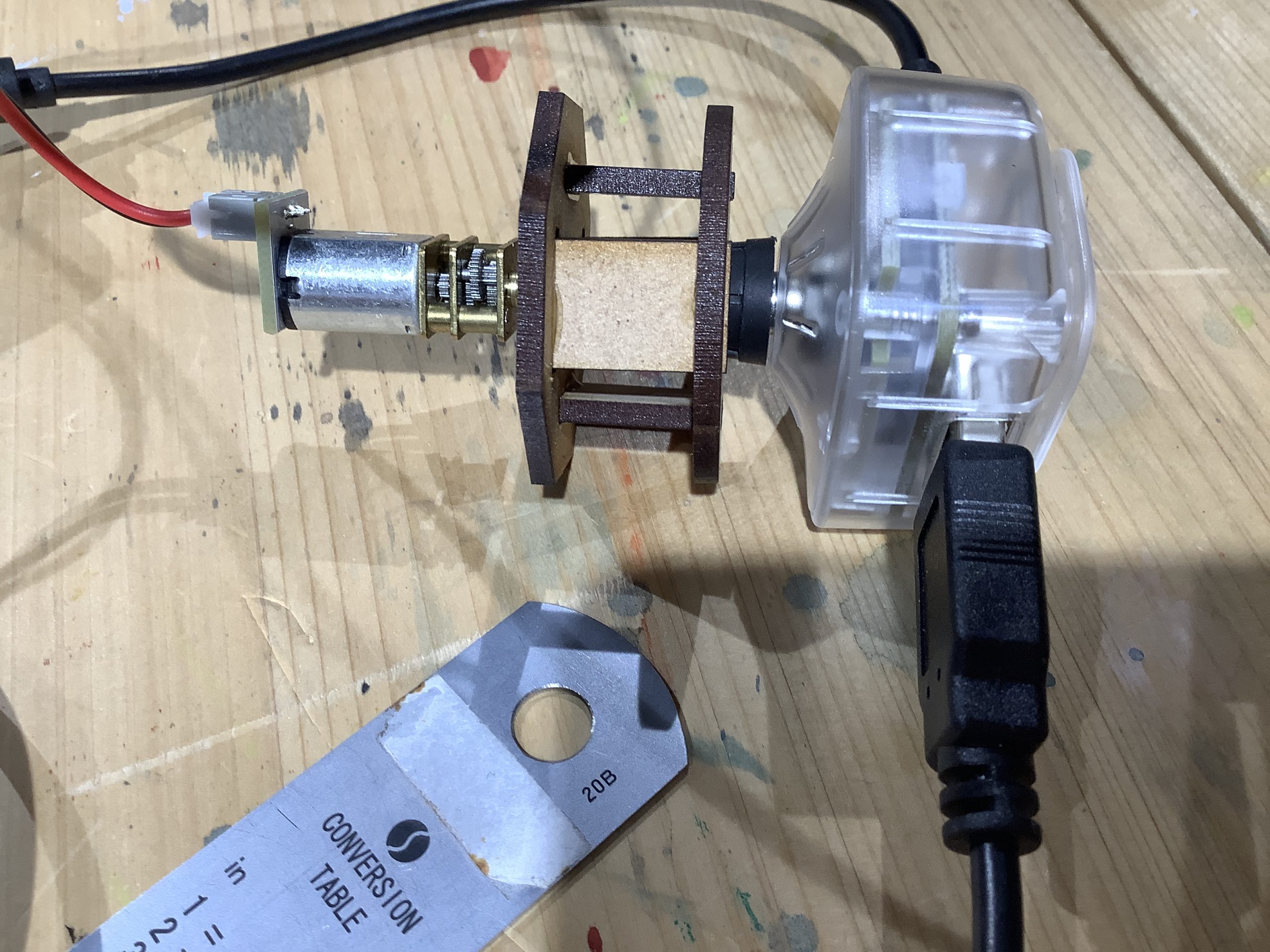
廃材をとcellを使ったオリジナルセンサです。 STOPに余っていたコーナークッションを適当なサイズにカットし、マウントとしてVIVIWARE cellを一つ二股の根元にテープなどでつけて、角の両面に距離センサを両面テープなどを使って装着します。

プログラム
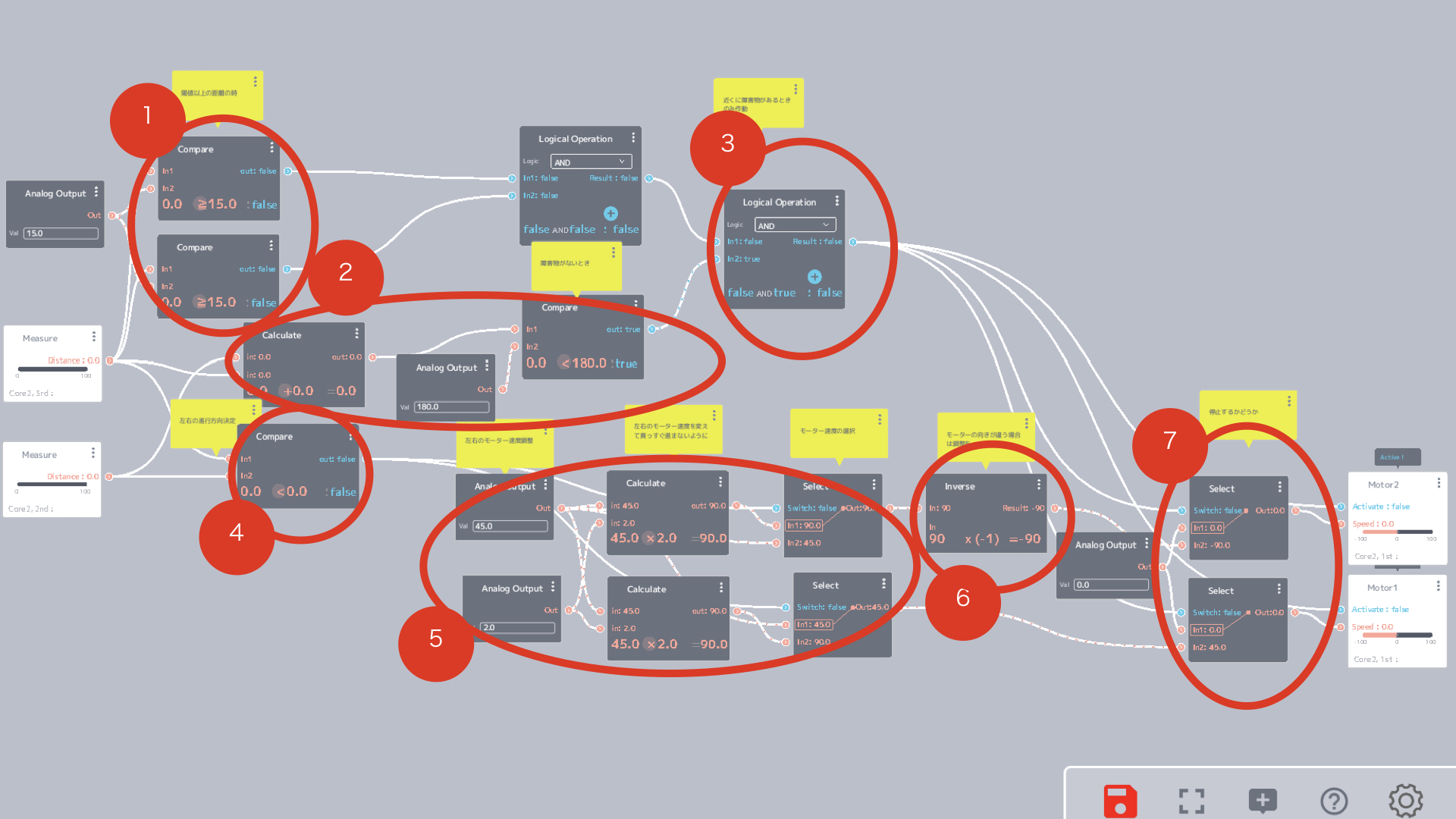
① 二つの距離センサ(VIVIWARE Cell Measure)の値が閾値(15.0)以上になるかどうかを判別。 これは近い距離になった場合にロボットを停止させる今後の処理のため。 ② 二つのセンサの距離の合計が閾値(180)を超えるかどうかを判定。 計測不能、距離が遠すぎる時は止まって欲しいからです。 ③ ①、②を満たしていればTrueを返すようになります。 ④ 左右の距離センサの値を比べて、どちらが大きいか判定。 ⑤ 距離が遠い方にロボットが進むようにモーターの回転速度を調節。 ⑥ モーターの付け方によって、方向が逆になる時があるので必要であれば反転。 ⑦ ①②③で決定したロボットが進む条件を満たしていれば、④⑤⑥で決定したモータの回転を実行、条件を満たしていなければモータを0にして停止。 少し複雑そうですが、一つ一つ見れば簡単です。 モータの設置向きなどによって、不都合が生まれることもあるので、その際はInverseモジュールなどでうまく調節してみてください!
所感
今回はついてくるペットとして作成しましたが、このテンプレロボットを起点に試行錯誤次第で色々なアイデアを実装できそうだなと思いました!
(Created by Yuki Horikawa)
今回は、VIVISTOP mini in YAMAGUCHIで作成された作品を紹介します!
VIVISTOP mini in YAMAGUCHIとは
2021年7月25日〜10月31日の間、山口市中心商店街にオープンした期間限定のVIVISTOPです。 商店街をフィールドとし、「こんな商店街あったらいいな」という「自分の住むまちがもっとこうだったらいいのに」という子どもたちのアイデアを元に、VIVISTOPで実際に形にして商店街で試すことで、自分自身でまちや社会を変えられるという自信や実感を育むことを目指し活動を行なっておりました。
動画
ロボットの前方に装着した二股の距離センサから対象物の左右の距離の差分を算出し、距離が遠い方向に向かうようにモーターの回転速度を自動調節します。 この機能自体は虫の触覚にとても似ていますし、前方からの見た目も虫っぽいです。 それではさっそく動いている様子をご覧ください!
二股距離センサ?
廃材をとcellを使ったオリジナルセンサです。 STOPに余っていたコーナークッションを適当なサイズにカットし、
プログラム
① 二つの距離センサ(VIVIWARE Cell Measure)の値が閾値(15.0)以上になるかどうかを判別。 これは近い距離になった場合にロボットを停止させる今後の処理のため。 ② 二つのセンサの距離の合計が閾値(180)を超えるかどうかを判定。 計測不能、距離が遠すぎる時は止まって欲しいからです。 ③ ①、②を満たしていればTrueを返すようになります。 ④ 左右の距離センサの値を比べて、どちらが大きいか判定。 ⑤ 距離が遠い方にロボットが進むようにモーターの回転速度を調節。 ⑥ モーターの付け方によって、方向が逆になる時があるので必要であれば反転。 ⑦ ①②③で決定したロボットが進む条件を満たしていれば、④⑤⑥で決定したモータの回転を実行、条件を満たしていなければモータを0にして停止。 少し複雑そうですが、一つ一つ見れば簡単です。 モータの設置向きなどによって、不都合が生まれることもあるので、その際はInverseモジュールなどでうまく調節してみてください!
所感
今回はついてくるペットとして作成しましたが、このテンプレロボットを起点に試行錯誤次第で色々なアイデアを実装できそうだなと思いました!
(Created by Yuki Horikawa)